
IP fixo no ESP8266 com Arduino
Como definir um IP fixo para o ESP8266 na rede WiFi com Arduino, e escapar da variação típica do IP dinâmico
O módulo ESP8266 pode ser usado para deixar seu Arduino acessível via rede WiFi mas, na configuração default (que usa IP dinâmico), ele recebe seu endereço IP do roteador a cada conexão, podendo ser um IP diferente a cada vez1 – exigindo um procedimento adicional para consultar esse IP antes de poder acessar ou enviar dados para o Arduino pela rede sem fio.

Mas há uma alternativa: assim como acontece com computadores desktop, o ESP8266 pode definir seu próprio endereço IP como um valor escolhido por você (o chamado IP fixo ou IP estático), e assim – se tudo o mais permanecer normal – os acessos após cada reinicialização dispensarão essa consulta prévia.
Para poder fazer isso, você precisa basicamente de 3 informações (além do nome e senha da rede sem fio à qual o ESP8266 deve se conectar):
- um endereço IP livre na sua rede local,
- a máscara de sub-rede dela (em redes domésticas geralmente é 255.255.255.0), e
- o endereço do gateway, que em redes domésticas geralmente é o próprio IP do roteador WiFi.
Se você não souber algum desses parâmetros, consulte o administrador da sua rede ou a configuração do roteador.
Nota: este artigo é sobre programação do ESP8266 conectado a um Arduino e exige conhecimentos intermediários sobre o funcionamento prático de ambos. Sugere-se que o leitor tenha dominado os conceitos básicos expostos em “ESP8266 do jeito simples: conexão ao Arduino, acesso à rede WiFi e resposta a ping” e em “ESP8266: Comandos AT” antes de prosseguir.
O comando AT+CIPSTA_DEF
Tendo os 3 parâmetros acima à mão, basta usar o comando AT+CIPSTA_DEF do seu ESP8266 para definir o endereço IP fixo a ser usado por ele.
Como um exemplo simples, vamos imaginar que o IP do roteador WiFi da sua casa seja 192.168.0.254, que a máscara da sub-rede seja 255.255.255.0, e que você verificou que o IP 192.168.0.235 está permanentemente disponível para uso. Nesse exemplo, para o ESP assumir para si este IP que está disponível, o comando a ser enviado a ele pelo Arduino seria:
AT+CIPSTA_DEF="192.168.0.235","192.168.0.254","255.255.255.0"Esse comando2 faz mais do que mudar o endereço IP naquele momento: ele define na memória permanente que esse IP fixo deve passar a ser usado sempre3 a partir de agora, inclusive em futuras conexões a qualquer rede.
A definição de IP fixo no ESP8266 fica gravada na memória permanente, até que você a defina de outra forma explicitamente.
Se um dia você quiser voltar a usar a obtenção automática de IP, pode usar o comando AT+CWDHCP_DEF=1,1 para reativá-la – inteligentemente, o ESP8266 faz com que o AT+CIPSTA_DEF e o AT+CWDHCP_DEF anulem automaticamente um ao outro (porque não faria sentido continuar a obter automaticamente um IP da rede se um IP default já está definido localmente, por exemplo).
Se você quiser apenas mudar temporariamente o IP, pesquise sobre o comando AT+CIPSTA_CUR, com os mesmos parâmetros do AT+CIPSTA_DEF mas que muda o IP apenas na hora, sem alterar as configurações permanentes do ESP8266. Se for usar essa forma alternativa, fique atento: se a conexão WiFI cair e o ESP8266 a reestabelecer, ou em qualquer outra descontinuidade, o módulo vai seguir o que estiver definido na sua configuração permanente, e pode vir a mudar o IP que você definiu, caso você tenha usado esse comando alternativo.
IP fixo no ESP8266 com Arduino: exemplo de código
O que nos interessa é apenas uma linha de código mas, para demonstrá-la, é necessário ter um programa com funcionalidades que permitam verificar o que essa linha faz.
O programa a seguir é uma versão reduzida e adaptada daquele que eu apresentei no artigo “ESP8266 do jeito simples: conexão ao Arduino, acesso à rede WiFi e resposta a ping”, e o que ele faz é conectar-se à rede sem fio, trocar (definitivamente) por um IP fixo o IP dinâmico recebido dela, e aí parar, deixando o ESP conectado, de modo que possamos ir no nosso computador e dar ping no endereço que escolhemos para o ESP8266 – e ele vai responder.
Vamos ao código completo para o IP fixo no ESP8266 com Arduino, colorizado para facilitar a explicação que vem após:
#define VELOCIDADE 115200
String REDE="br-arduino";
String SENHA="senha-da-rede-wifi";
String IPLIVRE="192.168.0.235";
String MASCARA="255.255.255.0";
String ROTEADOR="192.168.0.254";
#include <SoftwareSerial.h>
SoftwareSerial monitorSerial(9, 8); // RX, TX
void cmdESP(String cmd, String msg="", int limite=7000) {
// envia um comando para o ESP, aguarda, exibe e descarta a resposta
if (msg!="") monitorSerial.println(msg);
Serial.println(cmd);
unsigned long chegada=millis();
boolean continuar=true;
String S="";
unsigned long ultimochar=0;
while (continuar) {
if (Serial.available()) {
char c = Serial.read();
ultimochar=millis();
S=S+c;
if (c==10) { // LF, fim da linha recebida
byte p=S.indexOf(13);
String S1=S.substring(0,p);
if (S1=="OK") continuar=false;
if (S1=="ready") continuar=false;
if (S1=="no change") continuar=false;
if (S1=="ERROR") continuar=false;
monitorSerial.print(S);
S="";
}
}
if (millis()-chegada > limite) continuar=false;
}
if (S!="") monitorSerial.print(S);
}
void setup() {
monitorSerial.begin(VELOCIDADE);
monitorSerial.println("*** ESP8266 Static IP / IP fixo - BR-Arduino.org");
delay(2000);
Serial.begin(VELOCIDADE);
Serial.setTimeout(5000);
String cmdConectar="AT+CWJAP=\""+REDE+"\",\""+SENHA+"\"";
String cmdMudarIP="AT+CIPSTA_DEF=\"" + IPLIVRE + "\",\"" + ROTEADOR +"\",\"" + MASCARA + "\"";
cmdESP("AT+CWMODE=3", "Modo de operacao misto, AP + STATION");
cmdESP(cmdConectar,"Conectando a uma rede WiFi",30000);
cmdESP("AT+CIFSR","Consultando os enderecos IP definidos inicialmente",10000);
cmdESP(cmdMudarIP,"Definindo nosso proprio IP fixo");
cmdESP("AT+CIFSR","Consultando novamente os enderecos IP, apos definicao acima.",10000);
//cmdESP("AT+CWDHCP_DEF=1,1","Reativando o IP dinamico.");
}
void loop() {
}
As linhas iniciais são as definições do programa: a velocidade de conexão ao seu ESP8266 (115200 é o default nos modelos e firmwares recentes, mas antes o default era 9600), os dados da rede sem fio, e as informações sobre o endereçamento da sua rede local, que já comentamos acima.
A seguir vem a inclusão da biblioteca softwareSerial, que nos permitirá enviar dados para o monitor serial mesmo já tendo usado os pinos RX e TX para fazer conexão entre o Arduino e o ESP8266. Da forma como a usamos, os pinos 9 e 8 do nosso Arduino Uno ou similar se transformam em um segundo par de pinos RX e TX independentes, que podem ser conectados a um segundo Arduino para fazer a ponte com o monitor serial, conforme detalhado em Usando outro Arduino como intermediário para debug no Monitor com a softwareSerial.
O envio de comandos e recepção da resposta do ESP8266 ficam concentrados na conveniente função cmdESP().
A função cmdESP() é interessante, mas seu funcionamento não é relevante para esta explicação. O que ela faz é receber um comando a ser enviado ao ESP8266, um texto descrevendo esse comando e, opcionalmente, um limite de espera. Aí ela envia para o ESP o comando, envia para o monitor serial o texto descritivo, e aguarda até o ESP dar a sua resposta4, exibindo-a também no monitor serial.
A seguir vem a função setup() do Arduino, onde toda a mágica do nosso programa de exemplo acontece, e que dividi em 3 blocos coloridos.
O trecho em vermelho é uma inicialização tradicional, que define a velocidade das 2 portas seriais (a real nos pinos 0 e 1 para conexão ao ESP8266, e a virtual nos pinos 8 e 9 para conexão ao monitor serial).
Em verde temos um trecho que monta (mas não envia ainda) os 2 comandos que incluem os dados dos parâmetros definidos no início do programa. O primeiro deles é o cmdConectar, que usa o comando AT+CWJAP e o nome e senha da sua rede local; o outro é o cmdMudarIP, que usa o AT+CIPSTA_DEF, já explicado acima.
O trecho em rosa concretiza nosso teste: ele envia os comandos para conectar à rede sem fio e para definir um IP estático.
Finalmente, em rosa, temos a sequência que ativa o ESP8266 na rede e define seu IP fixo. É uma sequência de chamadas à nossa cmdESP repassando os comandos necessários para entrar na rede, mostrar qual o endereço IP do ESP, mudá-lo com o comando que montamos acima, e mostrar novamente o endereço IP do ESP.
Após a execução desse programa, o ESP8266 estará permanentemente com o IP fixo definido. Para voltar a ter IP dinâmico, tire a // do início da linha de comentário que deixei ao final do programa, que usa o AT+CWDHCP_DEF (já mencionado acima) para reestabelecer o uso do IP dinâmico.
O que aparece no monitor serial
Na primeira execução do programa, meu módulo ESP-01 ainda estava com a configuração default, e assim obteve um IP dinâmico no momento da conexão da rede sem fio, que depois foi modificado pelo nosso programa, levando ao log abaixo:
*** ESP8266 Static IP / IP fixo - BR-Arduino.org
Modo de operacao misto, AP + STATION
AT+CWMODE=3
OK
Conectando a uma rede WiFi
AT+CWJAP="br-arduino","senha-da-rede-wifi"
WIFI DISCONNECT
WIFI CONNECTED
WIFI GOT IP
OK
Consultando os enderecos IP definidos inicialmente
AT+CIFSR
+CIFSR:APIP,"192.168.4.1"
+CIFSR:APMAC,"1a:fe:34:f2:0e:1f"
+CIFSR:STAIP,"192.168.0.121"
CIFS:STMAC"18fe34f20e1"
OK
Definindo nosso proprio IP fixo
AT+CIPSTA_DEF="192.168.0.235","192.168.0.254","255.255.255.0"
OK
Consultando novamente os enderecos IP, apos definicao acima.
AT+CIFSR
+CIFSR:APIP,"192.168.4.1"
+CIFSR:APMAC,"1a:fe:34:f2:0e:1f"
+CIFSR:STAIP,"192.168.0.235"
+CIFSR:STAMAC,"8:e:34:20e1f
OKNote que na primeira consulta ao endereço IP, destaquei em vermelho a resposta, que indica um IP dinâmico fornecido pela rede sem fio. Na segunda consulta, a resposta (que destaquei em rosa) já é o IP fixo definido pelo nosso programa.
Se você executar novamente o programa, verá que a linha em rosa e a linha em vermelho exibirão o mesmo IP, porque a primeira execução do programa definiu um IP fixo e desativou a obtenção de IP dinâmico, como já vimos acima.
A montagem física
As conexões da minha montagem foram bem simples. As suas podem variar entre modelos de Arduinos5 e de módulos ESP8266, mas as minhas envolveram:
- Arduino principal: Um Arduino Uno.
- Arduino auxiliar para monitor serial: Outro Arduino Uno, para fazer o papel de USB-Serial, complementando a porta serial adicional emulada no Arduino principal.
- Placa ESP-01.
- Placa conversora de nível lógico.
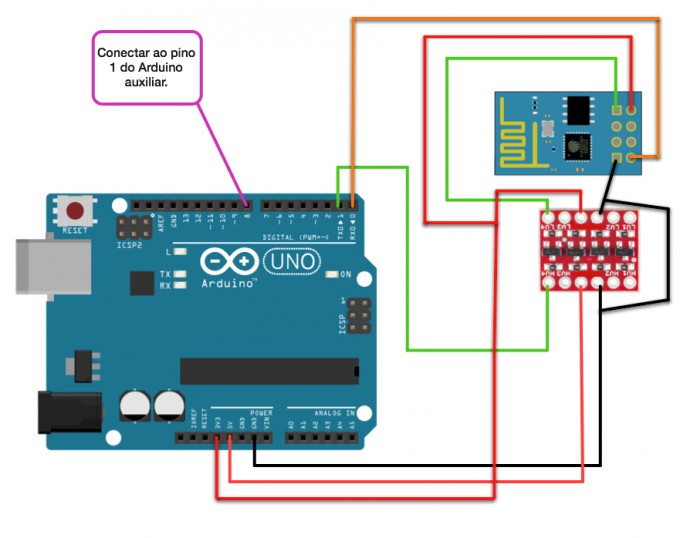
A imagem acima mostra as conexões dos pinos6, cuja descrição textual vem a seguir.
O Arduino auxiliar estava rodando o programa Blink (pode ser qualquer programa que não interfira com a serial), conectado a uma porta USB do computador, e com um jumper ligando o seu pino digital 1 ao pino digital 8 do Arduino principal. O monitor serial no computador deve ser aberto apontando para a porta serial correspondente à porta USB do Arduino auxiliar (essa parte da montagem é melhor explicada no artigo “Usando outro Arduino como intermediário para debug no Monitor com a softwareSerial”).
O Arduino Uno usa 5V e o ESP8266 usa 3,3V, cabe ao projetista compatibilizá-los.
Como o Arduino usa nível lógico de 5V e o ESP8266 usa 3,3V, é necessário recorrer a alguma técnica para converter as tensões dos sinais entre o Arduino principal e o ESP-01. Eu usei uma baratíssima7 placa de conversão de nível lógico como a descrita no final deste artigo anterior, mas poderia ter recorrido aos tradicionais divisores de tensão feitos com 2 resistores. No caso específico deste artigo, a única conexão que exige a conversão é a que fica entre o pino 1 (TX) do Arduino principal e o pino RX do ESP8266.
Quanto à alimentação, o pino GND do Arduino principal estava conectado aos pinos GND do ESP8266 e da placa de conversão de nível lógico. O pino 3V3 do Arduino principal estava conectado aos pinos 3V3 do ESP-01 e da placa de conversão de nível lógico, e o pino 5V do Arduino principal estava ligado ao pino 5V da placa de conversão de nível lógico.
Quanto ao sinal, o pino TX do ESP-01 estava conectado diretamente ao pino digital 0 (RX) do Arduino principal, e o pino TX do Arduino principal estava conectado, por meio da placa de conversão de nível lógico, ao pino RX do ESP-01.

Acima você vê a montagem real (exceto quanto aos cabos USB, que retirei para a foto) usada durante a escrita deste artigo. O Arduino auxiliar é o da esquerda, e o ESP-01 está plugado na placa auxiliar descrita neste artigo, que incorpora a placa de conversão de nível lógico, que não está visível devido ao ângulo, pois o ESP-01 fica suspenso acima dela.
- A existência de variação depende da configuração do roteador e do uso da rede. ↩
- Testado com o firmware AT oficial versão 0.25.0.0, de junho de 2015 – tudo o que está descrito neste artigo assume que o seu módulo ESP está com essa versão, ou com outra que seja compatível. Versões antigas certamente não contavam com alguns dos comandos aqui aplicados. ↩
- Até que você reconfigure explicitamente, claro. ↩
- Ou o prazo limite acabar, claro. ↩
- Ou até mesmo substituindo o Arduino auxiliar por um conversor USB-Serial adequado de sua preferência. ↩
- Fique atento à ordem dos pinos do seu conversor de nível lógico, pois ela não é padronizada e varia bastante. ↩
- Comprada na Proesi, mas pesquise e você encontrará preços e fretes na melhor combinação para o seu caso. ↩







Comentar